
hello everybody!
i’m using a kinect2 and want to detect wheater the user is looking towards the kinect or away.
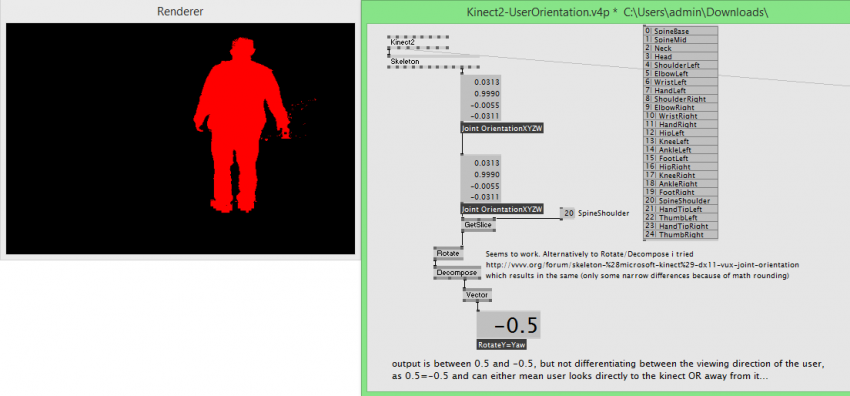
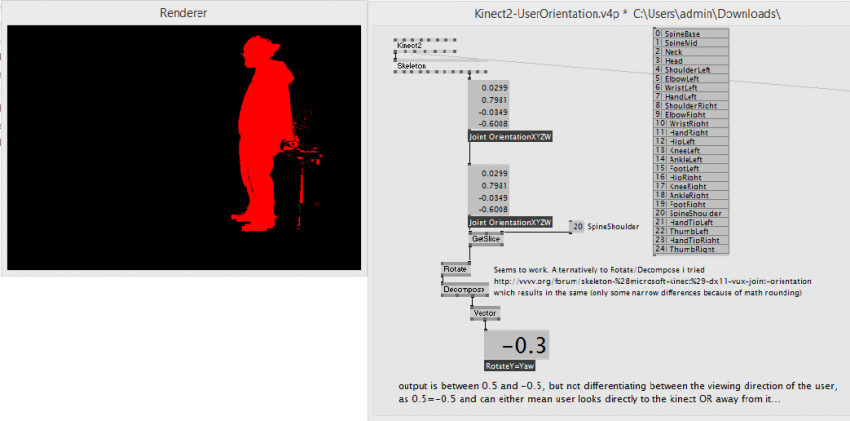
the node “Skeleton (Kinect2 Microsoft)” outputs “JointOrientationXYZW” as quaternion.
how can i use this information to make my decision?
after converting the quaternion data to euler, my values seem to be somehow correct, but not really useable.
some examples for the converted y-rotation:
- +0.4999 = user looking towards OR away form the kinect
- -0.4999 = user looking towards OR away form the kinect
furthermore 0.3/-0.3 seems to mean that the kinect2 sees the user from the side. why are the values not 0,5/-0,5 then?
btw: the 3d boxes previewing my skeleton are rotated in the correct way when i use the “Rotate (Quaternion Vector)” as transformation…
thanks

Kinect2-UserOrientation.v4p (10.9 kB)