I seem to miss a fundamental understanding about projections there. So I have objects to track with the Kinect. What I am getting there is basically a WorldTexture. So with some Filtering and Processing I can change that Texture in a b/w mask, that is well… a Texture
How can I align that mask with the 3d space. When I calibrate the Kinect, all I get is the sensors position in Space, but I need the mask to match with my projectors view, don’t I?
@antokhio unfortunately rulr is poorly documented. I found a few things, but they seemed applicable, when kinect and projector a close to each other.
but, what would be the old fashioned way. I use the dx11.parti les calibrator, and i get the kinects transform, i use the projector calibator and i get the projectors transforms. how do i match up that mask i created?
Edit: I should explain my workflow so far maybe.
Getting WorldTexture
Filtering for a narrow Region, approx 4 m away, and 2 m deep. this is pretty much giving me 2 abstract, slowly moving objects.
3a. Processing the filtered Texture to get a b/w mask
3b. Processing the filterd Texture with VL to get the Objects Centers and Dimensions (only in 2d)
Aligning 2 Quads with the coordinates from 3b
Applying the mask from 3a on the whole screen
This is giving me a good masking of the objects, but only from the kinects viewpoint.
Can I just Transform that whole setting to fit with the projector?
Well it’s normally done, by getting some point 3d position in projector space, then by getting same point in kinect space, then it runs some fitting algorythm to allign both spaces together.
I know that’s sound hard but you have to try with rulr, it’s not that hard and you will have perfect aligment.
@antokhio thanks for your help mate. Bevor I take this to the stage, I have to ask one more thing (I hope just one more): does this calibration work with the Kinect and Projector being far apart? The Projector is 10 m behind and 3 m above the kinect. So the projected chessboard will cover the whole stage where the kinect is positioned…
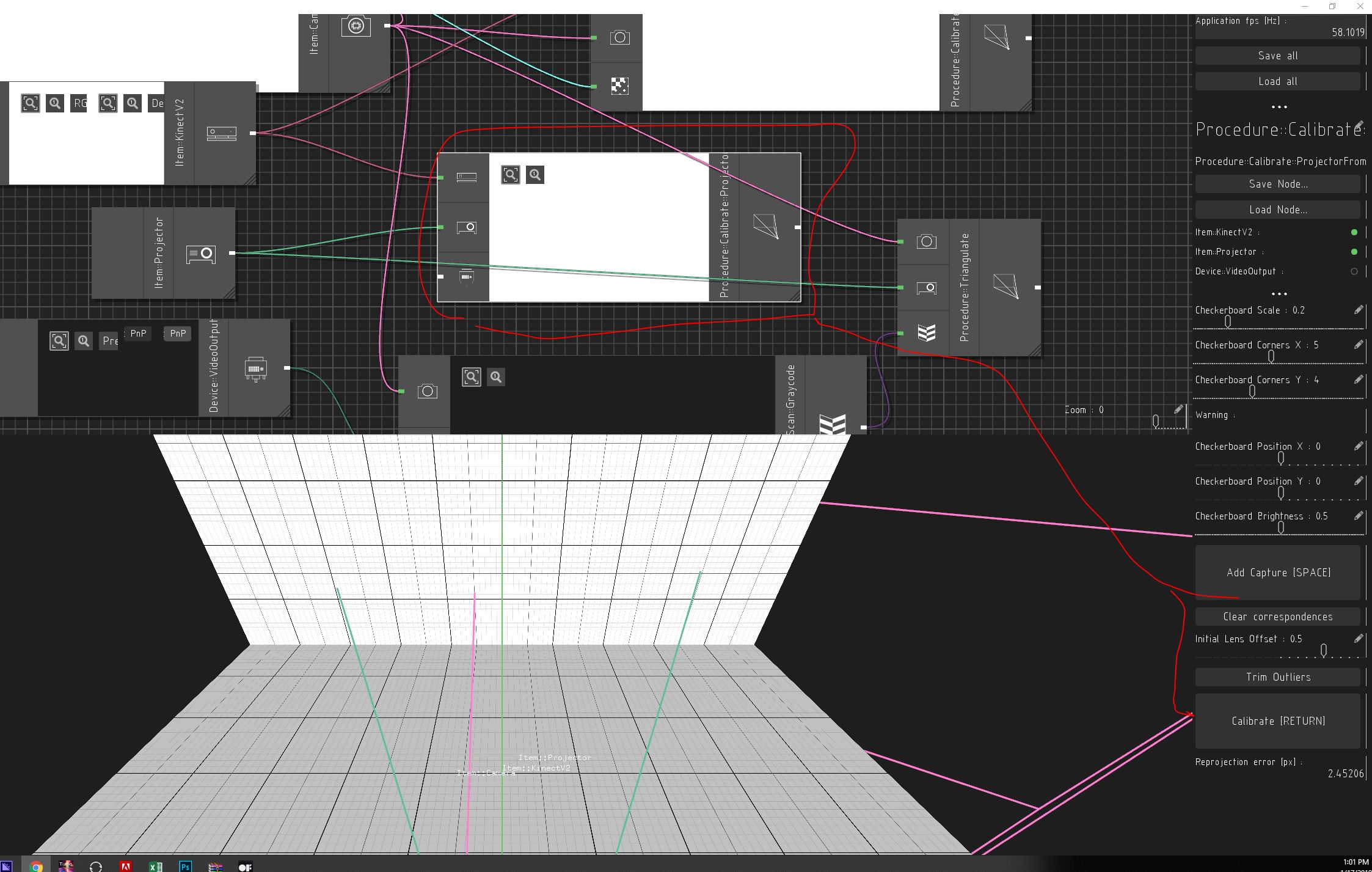
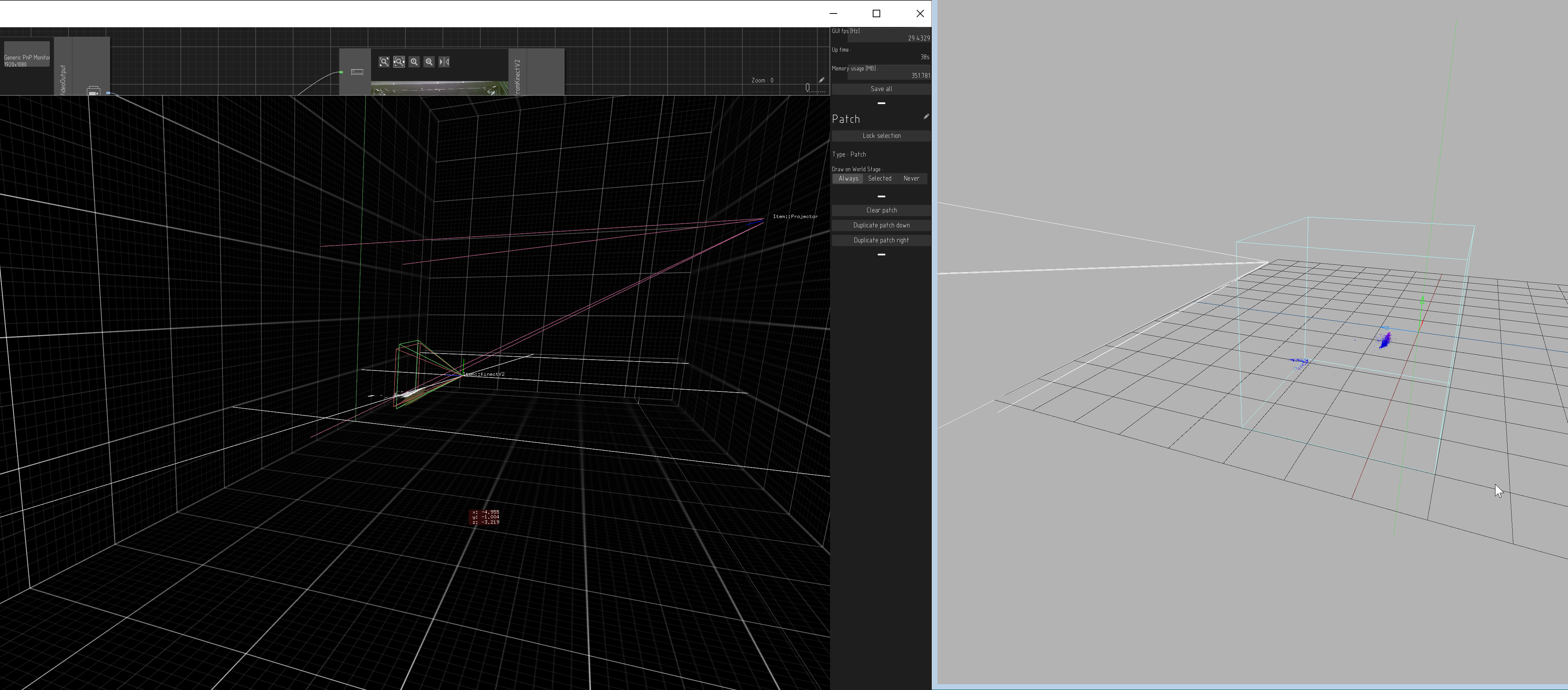
@antokhio Thank you for the rulr hint. It seems like the calibration I made there is fine (and supereasy). But there is something wrong when importing the matrices to vvvv. It seems like the Projector is pretty much somewhere else. This is a comparison between rulr’s projector position and vvvv (using the node15 workshops demopatch).
Hi, as i remeber there were two types of output somewhere one for vvvv and another one for open frameworks. And second option would be to retry the calibration as i think i had something simmiliar with projector was some where in the outer space…
@antokhio I checked with both export options. Only the ofx-Version is useful. I also recalibrated, but that doesn’t seem to be the problem, since the projectors positions is displayed correctly in rulr. there must be something wrong in converting the ofx-matrix to vvvv-transforms
EDIT: I just tried to export a Projector, which I’ve manually set in rulr, to see if it’s the same when importing to vvvv. It is not. A Projector with position coordinats of 1, 1, 1 in rulr gets converted to be 1, -1, -1 in vvvv
I finally made it. It is the ofxray camera to import. Just when using the Reader (ofxray) inside the module the view is scaled to -z. That being corrected everything works fine.
Now there still is the question open, how I can lay a kinects texture over the projectors view. That texture needs to placed on a quad, but that quad is where in space?
If you want to reproject the kinect world texture so to project on top of anything it sees.
I would do it this way :
Convert the world texture to a Grid mesh or use a pointcloud instead.
Use a long lens ratio projector.
Put some boxes in the corners , center or other things that can give you a good reference of the area you need to use, you can take all those boxes after calibration.
Use this to calibrate and match you mesh to the physical projection so to get the right camera transforms view projection . https://vvvv.org/contribution/vvvv.tutorials.mapping.3d
Do a mask texture of your world texture of the desired part.