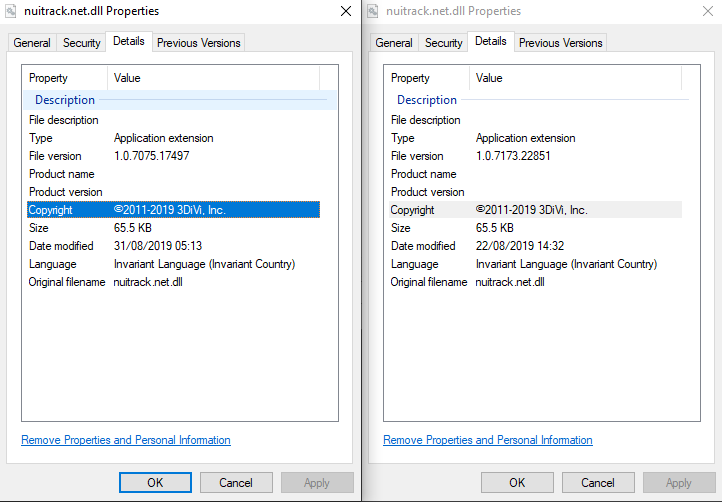
Thanks for your answer, I did, I uninstalled than reinstalled the latest nuitrack version, than I generate lic. key on dashboard and activated with Nuitrack activation tool… (one year windows licence
Hello again @KX, I will need to have a look at it then but am afraid I will need some time since my schedule is a bit tight these days and I have not really touched Nuitrack in a bit.
Hi @ravazquez,
Sorry to not reply, it would be nice to try out in the next few weeks how is it working, because we need to decide which tracking we gonna use.
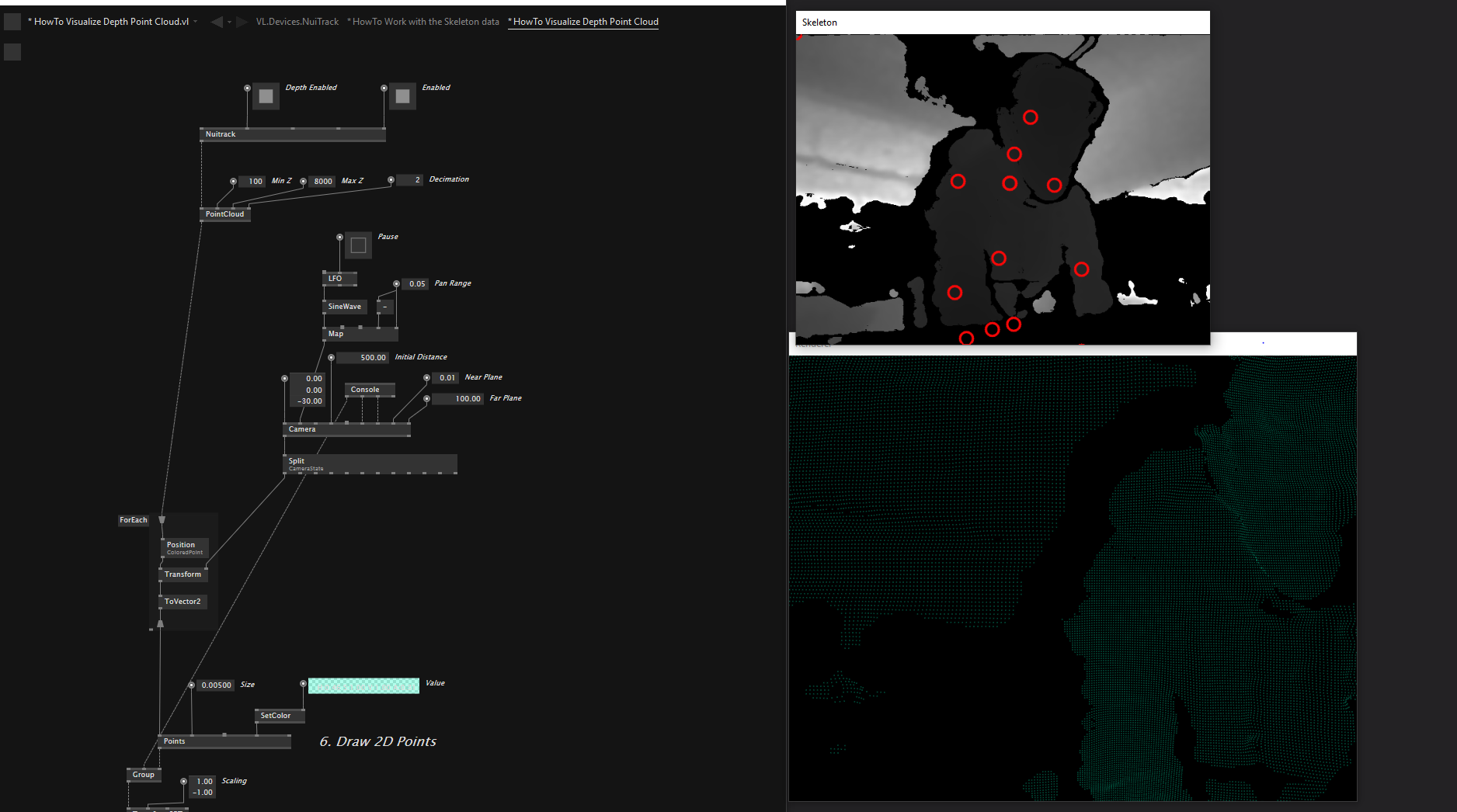
Just a quick update, I pushed a new version of the library (0.1.17) making use of newly introduced resource operators as well as fixes to point cloud. It requires a very recent VL >= 2019.2-0300 (available through teamcity.vvvv.org)
Pushed another update (0.1.18) which fixes point cloud using a Kinect2 (or any other device which has different resolutions in color and depth or different frame rates on those). Note however that the assigned colors to the points where never tested and are probably wrong when the color and depth images don’t align. Need to have a look at that with Xenko at some point as I had no idea how to render > 50k points in different colors with Skia.
thanks for your work. having proper depth cam support should prove handy in the future!
I tested the realsense today, it works quite well so far. What is the Min Z/Max Z unit? mm or something?
next would be to have a long-term test (to make sure it is viable for installations) and a 3d test, if the pointcloud can be used to reconstruct the world similar how the late kinect2 did.
for that I would need a way to use your gamma advances in beta.
would it work to simply update some of the nugets and dlls?
@velcrome glad to hear it is working for you. Min and Max Z are in mm (at least for a Kinect2).
Regarding stability I believe @Elias had it running for days with no major issues.
As for the pointcloud, the current solution is far from production ready specially regarding performance. A GPU (Xenko/Stride) approach will be the way to go when that finally lands in VL. In the meantime some improvements could be made but don’t get your expectations too high. (Kinect2 is performing significantly better already if that helps).
As far as beta goes I have no knowledge on what is needed to get this playing along with it but I suspect it involves .netcore and other lower level plattform bits which are beyond the library implementation itself.
I should find time soon to update the VL integration layer of beta to incooperate the latest VL bits. Just updating the packages won’t work because of bigger changes brought by new roslyn backend.
But in theory once we have VL back in its newest form in beta, and beta having DX11 it should be possible to upload the pointcloud to the GPU in a more performant way - I think the basic infrastructure should already be there.