Hi,
I am using the MarkerDetector function and I would like to get the rotation information of the marker. Similarly to the angle output returned from the FiducialDetector function.
Hi,
I am using the MarkerDetector function and I would like to get the rotation information of the marker. Similarly to the angle output returned from the FiducialDetector function.
Hi @acfrost,
What you are describing involves:
I tweaked the “Calculate a camera position using Aruco” help patch a little to save some time:
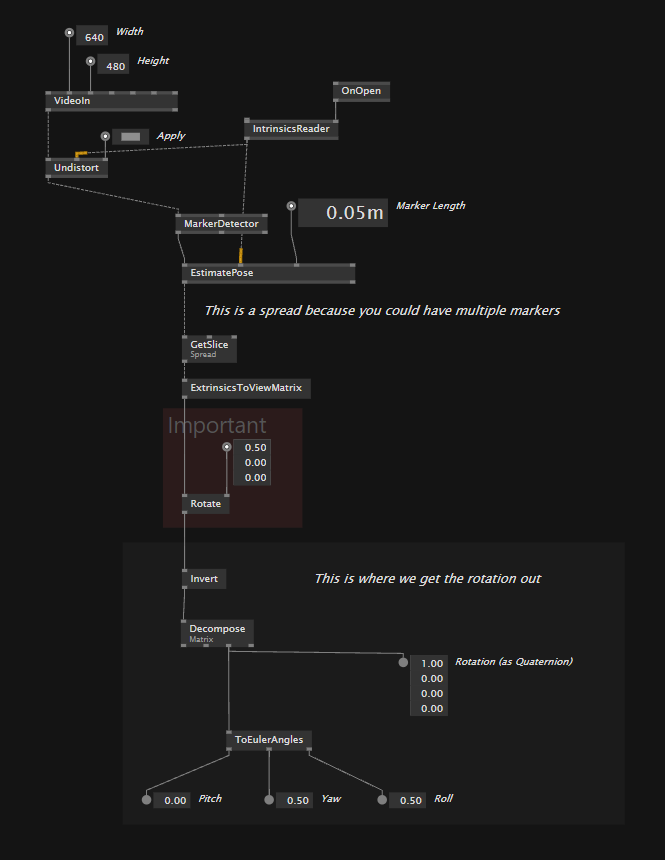
And here is the patch above:
Extract rotation from Aruco pose estimation.vl (102.9 KB)
Keep in mind you need to calibrate your camera and adjust the marker length in order for things to match your specific setup.
Hope that helps.
Thank you very much for the patch! It was very helpful.
This topic was automatically closed 365 days after the last reply. New replies are no longer allowed.