Hi
I am looking for a 3 axis and wireless gyroscope. I experimented with a Nexus One but it seems like the gyroscope is not free to go round more than one time , as it goes from 0 to 360 (even less somehow) then it stops and can only go backwards. I am not sure how the inner guts of those gyroscopes are but what I need is to be able to count many turns so it should be “free” and not constrained.
Arduino is of course my next thought, any other taker?
S.
Wii Remote could work
Hi
I ve spent a few hours over the matter and, first of all it may be possible that my Nexus One doesn t even have gyroscopes but just acceleromters.
Anyway, the calculation of the absolute position of the sensor is done in software as both accelerometer AND the gyroscope are sensing the inertial movement.
That is the gyro is sensing the angular acceleration, not an absolute value in angles.
The absolute value in angle is calculated with software. That is why it won t be able to tell you when it reaches 260 deg of rotation whether it s spinning over or backward.
Generally the gyro+accelerometer+magnetometer are called IMUs, they are boards packing everything together and sometime even a processor to do all the calculation and send the valus over serial output or similar.
Now what I ve not understood yet is whether this IMUs can sense the multiturn action or not.
S.
Io http://www.youtube.com/watch?v=_bVDa_oMN2E
i made that with a gy85 9dof imu from dx.com
but the calculations to get the magnetic north an all the kalmen filter needs to be donde in the hardware side, cause its requieres super precise response to get the actual magnetic north.
i tested several arduino sketches but i wasnt able to make any of them that use 9dof, i made it with only 6 axes, and its not precise enough for what im looking at
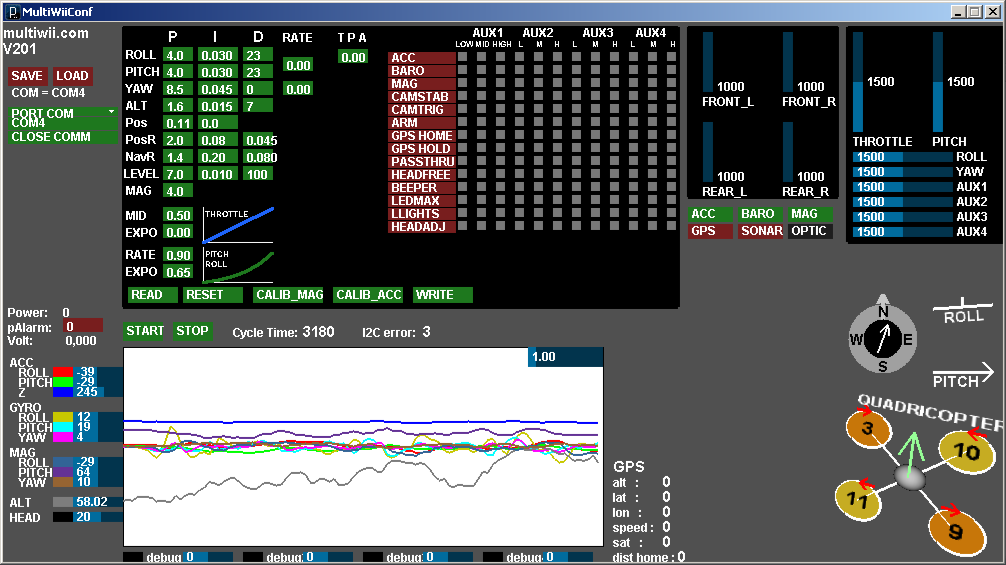
but i found the perfect solution, using the multiwii sketch.
multiwii.com its the code to creaate tricopter,quadcopter,octocopter and many other kind of rc flyng devices
if you connect any imu to an arduino and you upload that sketch, there is a calibration gui that shows the data of the sensor,pitch,roll, and yaw, and the magnetic position, and thats supper aquarete
the next step ( and here its where im stuck ) its to emulate that interface with vvvv
here its the details of the protocol
i know how to send data via rs232 with vvvv, but i dont know how to do it in that way with the checksum
but thats your solution. Multiwii sketch have details instructions of how to add bluetooth modules or rf modules to create a wireless connection for calibration proposes
Hi
so far, using a board from an unused ARDrone V1 and Woei’ s ARDrone nodes I got something, problem is that, as far as I understand the ARDrone board is a 6DOF + it probably has a single axis compass. So after a bit of use it drifts badly and does not give back an absolute response, also the axis mess up and what was x before becomes y and so on.
That s a good proof of concept so far but it seems like a 9DOF IMU is what I need to be able to retrieve always the absolute attitude of the sensor.
Simone
Before you end up banging your head against the wall, beware that the “gyro” element does not work in the Android version of Control.
S.
drone 1 have 6dof, drone2 have 10dof ( 3acc,3gyro,3mag,1bar + sonar )
without mag you can get gyro on y axe, but its all relative movement not abusolte.
yeas for sure you can get all the aquare data to do something like this
to get an idea of the difference
6dof with sensor fusion http://www.youtube.com/watch?v=YuuJFKabLi8
kalman filter difference http://www.youtube.com/watch?v=fzjEMOOBuFA
9 dof with kalman filter http://www.youtube.com/watch?v=p8H2-vkUM0I
those imu with arduino inside are way more expensive that buying the nano and the g585 from dx, and its the same, the differente its that we need the code to get 9dof and kalma filter with a atmel + the chips from the gy85. Multiwii have exacltry that, but to get the data we need to know whow to make the rsr232 sting to request the data under that protocol…
with that you have all that you ned to make any uav or oculus rift glases, even full body motion caption using several sensors
Anyone know if there’s a device out there like these which will let me track absolute position ?
There is a two handed controller called Razor Hydra that seems to work well on tracking location of the hands:
http://www.razerzone.com/store/razer-hydra
here two students used it to create a VR setup, project Holodeck:
The Hydra looks very interesting. Any idea what the range is? and if there are similar diy projects around?
Their website support says about a meter radius, but in the above video it seems to be bigger range.
here is the FAQ from Razor site:
@mrboni check the data of my post. 9dof with the multiwii sketch give you absolte position, and its super cheap, i paid like 34uss for de 9dof and 18uss for the arduino nano
but we need to get into the multiwii protocol to understand how to request the data via rs232 like that softare does, it all opensource, but i dont know how to do the checksum part
Check this out, the PS Move API:
http://www.youtube.com/watch?feature=player_embedded&v=euQU6n1OAqI#!
@vjc4 - you’re getting absolute position (not absolute rotation) with sensors from a wii? There must be a lot of drift surely?
@mrboni the wiimote have accelerometer + gyroscope (if you add the motion plus)
you dont get absolute position, only forces, no magnetic estimation at all.
and on my video im not using wii, im using a 9dof gy85 imu, BUT im using only accel + gyro, im not using magnetrometer, cause i didt found any sketch with the kalman filter for those chips.
again,I insist, the best way to get the data calculated from any sesor combination ( almost any IMU or any random group of diffenet accel + gyro + mag ) is using multiwii sketch that allows almost any kind of comercial imu//sensors, and the sketch does the filtering on the arduino side and sends the data via rs232 or bluetooth if you want.
BUT we need to get this done, i dont know how to prepare the checksum part of this code http://www.multiwii.com/forum/viewtopic.php?f=8&t=1516 if you dont send the right data, you wont get nothing back