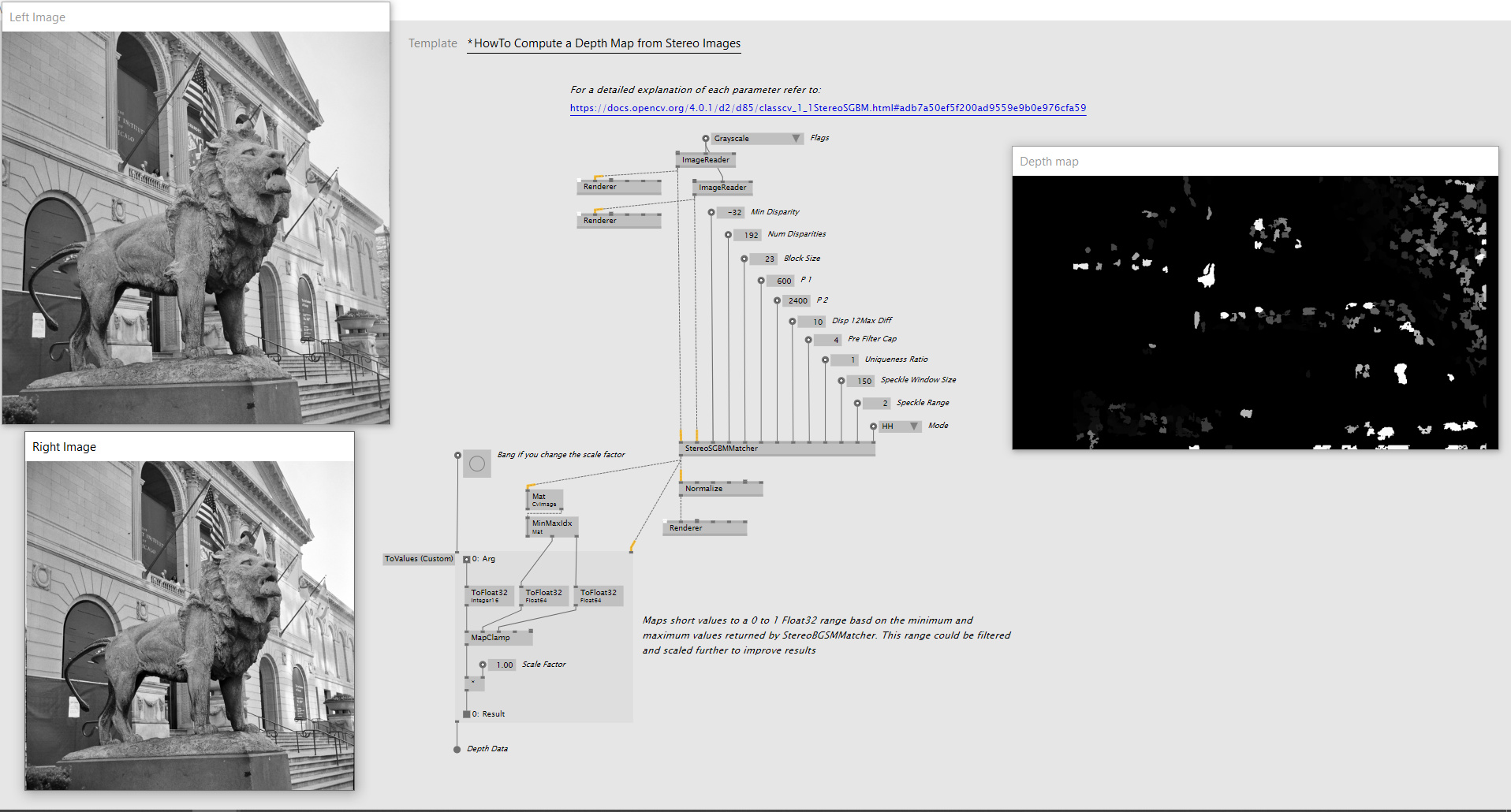
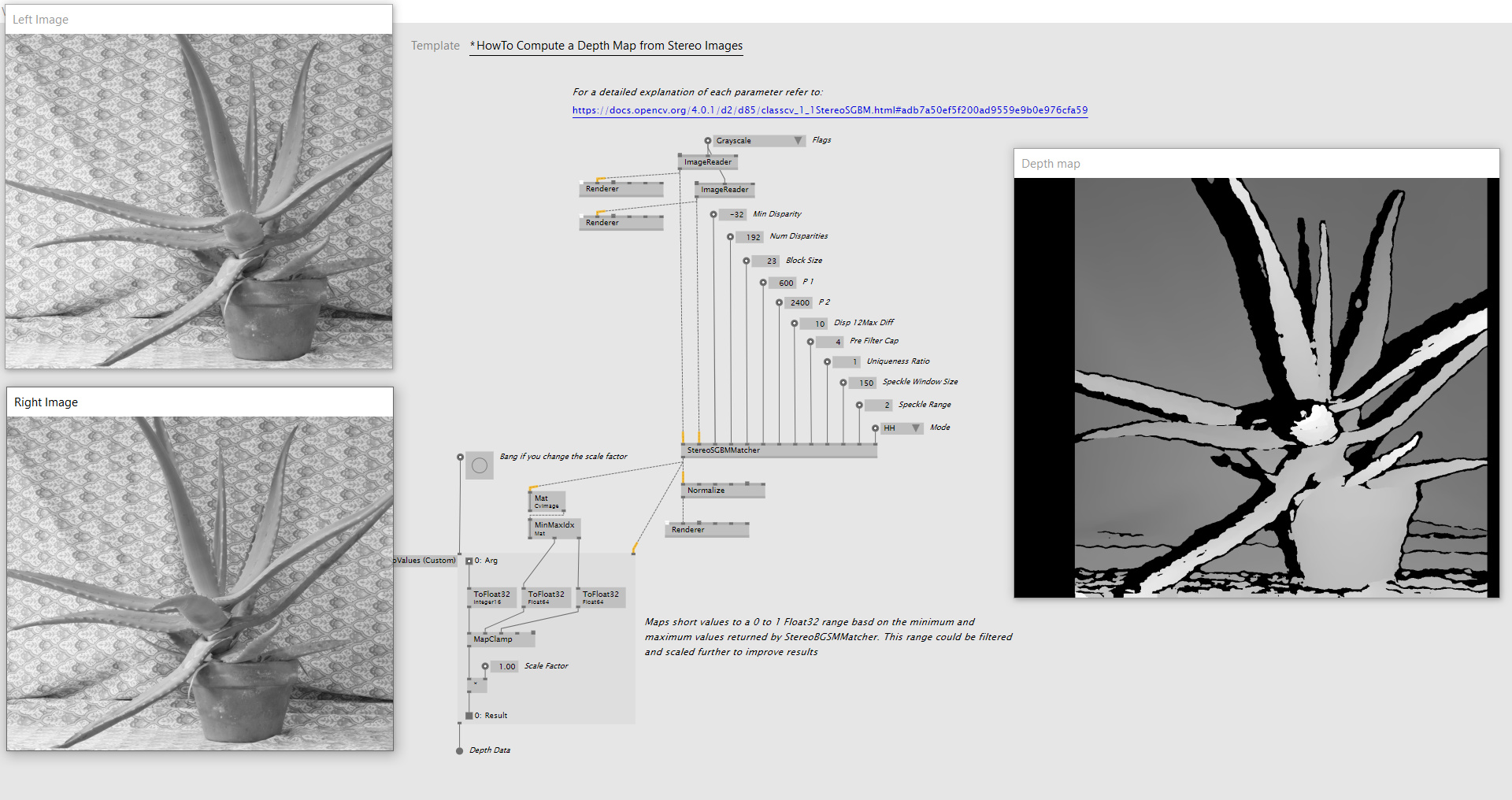
I was testing out the example patch in VL from the openCV package, and I can’t seem to try and reproduce the depth map results other than the aloe vera test images.
I have tried tweaking some of the parameters but I still can’t get a depth map.
Any suggestions for this?
I haven’t tested it and might be mistaken, but this doesn’t really seem to be a matching pair of left and right image … look at the circle feature to the left of the image, top left of the arc. In the left image it’s barely visible, in the right image you can see it completely. The flag on the right is entirely missing even though the camera is supposed to have moved further right.
Looks like the the cam was tilted on the second image and not just moved in parallel.
Possibly a different zoom/fov even.
Ah yes I actually got the images from the web when I googled stereo images after I couldn’t get the stereo images from my webcam working .
Anyway after seeing your comment, I tried them out with another set stock stereo images and managed to get the patch working.